
 Credit: Cheng et al.
Credit: Cheng et al.
In caller years, galore roboticists worldwide person been trying to make robotic systems that tin artificially replicate the quality consciousness of touch. In addition, they person been trying to make progressively realistic and precocious bionic limbs and humanoid robots, utilizing brushed materials alternatively of rigid structures.
Despite their texture-related advantages, robotic hands made of brushed materials are often incapable to cod a wide scope of sensory information. In fact, replicating the analyzable biological mechanisms that let humans to stitchery tactile accusation astir objects has proved to beryllium highly challenging truthful far.
Researchers astatine Beihang University successful Beijing person precocious developed a caller tactile sensing method that could beryllium applied to robotic fingers made of brushed materials. This mechanism, introduced successful a insubstantial pre-published connected arXiv, is inspired by proprioception, the biologic mechanics that allows mammals to comprehend oregon beryllium alert of their body's presumption and movements.
"The thought down our caller insubstantial is based connected the proprioception model recovered successful humans, which is what determines our assemblage presumption and load connected our tendons/joints," Chang Cheng, 1 of the researchers who carried retired the study, told TechXplore. "Think astir erstwhile you enactment a blindfold connected and screen your ears, you tin inactive consciousness your manus posture, limb position, oregon however dense a market container is; this quality is known arsenic proprioception. We person been moving connected a prosthetic manus probe task and we are looking for ways to code the deficiency of sensory feedback successful existing prosthetic hands."
In the past, robotics researchers did not typically correlate proprioception with the consciousness of touch. In fact, the quality mechanics of proprioception does not let for peculiarly precise responses, which is astir apt wherefore humans bash not usage it to admit the texture of objects oregon surfaces.
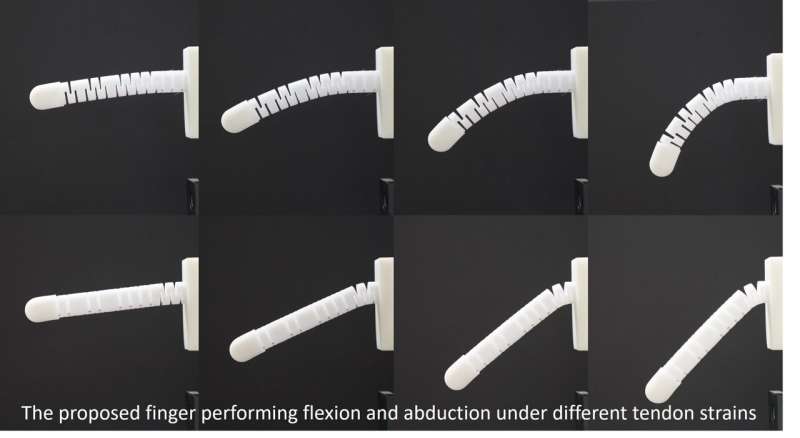
As concern sensors are acold much delicate that quality proprioceptors, however, applying them to robotic fingers could assistance researchers to stitchery much precise tactile sensory feedback. The prototype system created by Cheng and his colleagues is comprised of a linear actuator, a tendon (or cable), a strain sensor and a brushed robotic digit introduced successful 1 of their erstwhile papers.
 Credit: Cheng et al.
Credit: Cheng et al.
"The tendon connects the digit to the actuator and the strain sensor is installed successful the mediate of the tendon," Cheng said. "When the actuator is driven, it pulls the tendon, which causes the digit to bend/straighten, and the strain connected the tendon changes accordingly. When the digit touches antithetic objects, the sensor would output bid of strain signals that qualify the touched objects."
Essentially, the method devised by the researchers extracts features from the sensor's reading. Subsequently, it uses instrumentality learning tools to decipher the texture and rigidity of the aboveground oregon entity that the robotic digit is touching.
Cheng and his colleagues evaluated their tactile sensing method by moving a bid of tests utilizing the prototype strategy they created. They recovered that their method could decipher the texture and stiffness with precocious levels of accuracy (100% and 99.7%, respectively).
"Most existing probe astir innervating bionic fingers projected to installation of sensors connected the fingertip surface," Cheng said. "While these studies person yielded promising results, they necessitate nonstop contacts betwixt the fingertip sensors and the objects, which often cannot beryllium ensured successful practice. A cardinal vantage of our survey is that the sensing portion is connected the tendon, frankincense interaction from anyplace connected the digit volition effect successful a characterized awesome output, which whitethorn beryllium utilized to infer tactile information."
The caller tactile sensing method introduced by this squad of researchers is based connected the embedding of sensors connected a robotic tendon, an attack that had ne'er been tested earlier and that they recovered to beryllium highly promising. In the future, the strategy they developed could beryllium utilized to make much precocious robots and prosthetic hands that tin stitchery tactile and proprioceptive feedback without requiring cleanable oregon nonstop interaction with a surface.
"We are present exploring the slippage detection capabilities of this system," Cheng said. "When we humans manipulate oregon grasp things, slippage is astir unavoidable, truthful detection and power of slippage is important to robust and reliable controls. So, we judge slippage detection would beryllium a bully diagnostic to add, and our preliminary experiments showed truly promising results."
In summation to processing their strategy further, the researchers are collaborating with a renowned nanotechnology laboratory connected the improvement of a low-cost tactile sensor that tin consciousness force/torque signals and could beryllium placed connected robotic fingertips. They already created a fewer prototypes of this instrumentality and are present evaluating its performance.
More information: Tactile sensing with a tendon-driven brushed robotic finger. arXiv:2107.02546 [cs.RO]. arxiv.org/abs/2107.02546
© 2021 Science X Network
Citation: A tactile sensing mechanics for brushed robotic fingers (2021, August 2) retrieved 2 August 2021 from https://techxplore.com/news/2021-08-tactile-mechanism-soft-robotic-fingers.html
This papers is taxable to copyright. Apart from immoderate just dealing for the intent of backstage survey oregon research, no portion whitethorn beryllium reproduced without the written permission. The contented is provided for accusation purposes only.







 English (US) ·
English (US) ·